 Quien se haya aventurado a la creación de un robot rodado partiendo de elementos básicos como plástico, metal, motores, ruedas y demás, puede dar fe de que es una tarea un tanto compleja, especialmente cuando se debe modelar al robot con herramientas simples como cierras de mano, pinzas y martillos.
Quien se haya aventurado a la creación de un robot rodado partiendo de elementos básicos como plástico, metal, motores, ruedas y demás, puede dar fe de que es una tarea un tanto compleja, especialmente cuando se debe modelar al robot con herramientas simples como cierras de mano, pinzas y martillos.En el diseño de los mecanismos de tracción, se puede optar por conectar los ejes de los motores directamente a ruedas u orugas así como de realizar un pequeño sistema de transmisión con engranajes o poleas.
Es necesario hacerse de un "chasis" o "base" para montar en él los mecanismos y tomarlo como cimiento para construir sobre éste los soportes para motores, placas de control y sensores.
Muchos entusiastas se dan por vencidos antes de tener algo funcional o al menos que "camine", y... terminando al empezar, solo se consigue frustración y pérdida de tiempo y dinero.
Aquí les presento una alternativa que puede dar una mano a quienes quieran acortar el camino.
La idea es formar una especie de chasis con 2 motores DC de pequeño tamaño y unos engranajes que ya vienen montados en los autitos; también poseen portapilas y el costo de este par se eleva sólo hasta el 20% de un servomotor y es aún mucho menor que el de un motor DC.
Si bien el resultado no tendrá cabida en las categorías normales de sumo u otros tipos de robots de competencia, el robot a construirse sirve para practicar y aprender conceptos básicos que pueden ser aplicados en futuros emprendimientos.
Para ensamblar la base serán necesarios dos autitos como los de la figura de arriba, cada autito formará una mitad de la base, por acá se los conoce en las tiendas de juguetes como "autitos locos" :)
 El proceso es realmente simple:
El proceso es realmente simple:1 - Se separa la parte superior del auto, por debajo se encuentran los tornillos para hacerlo, al separar la parte superior de la inferior se pueden distinguir los motores que darán mobilidad a nuestra creación, también se puede ver la caja de engranajes que mueve las ruedas.
2 - Remover todos los cables e interruptores que se ven en la imagen.


3 - Recortar los ejes de las ruedas de manera que se separen las ruedas que no están cerca de los engranajes, como se ve en la figura.
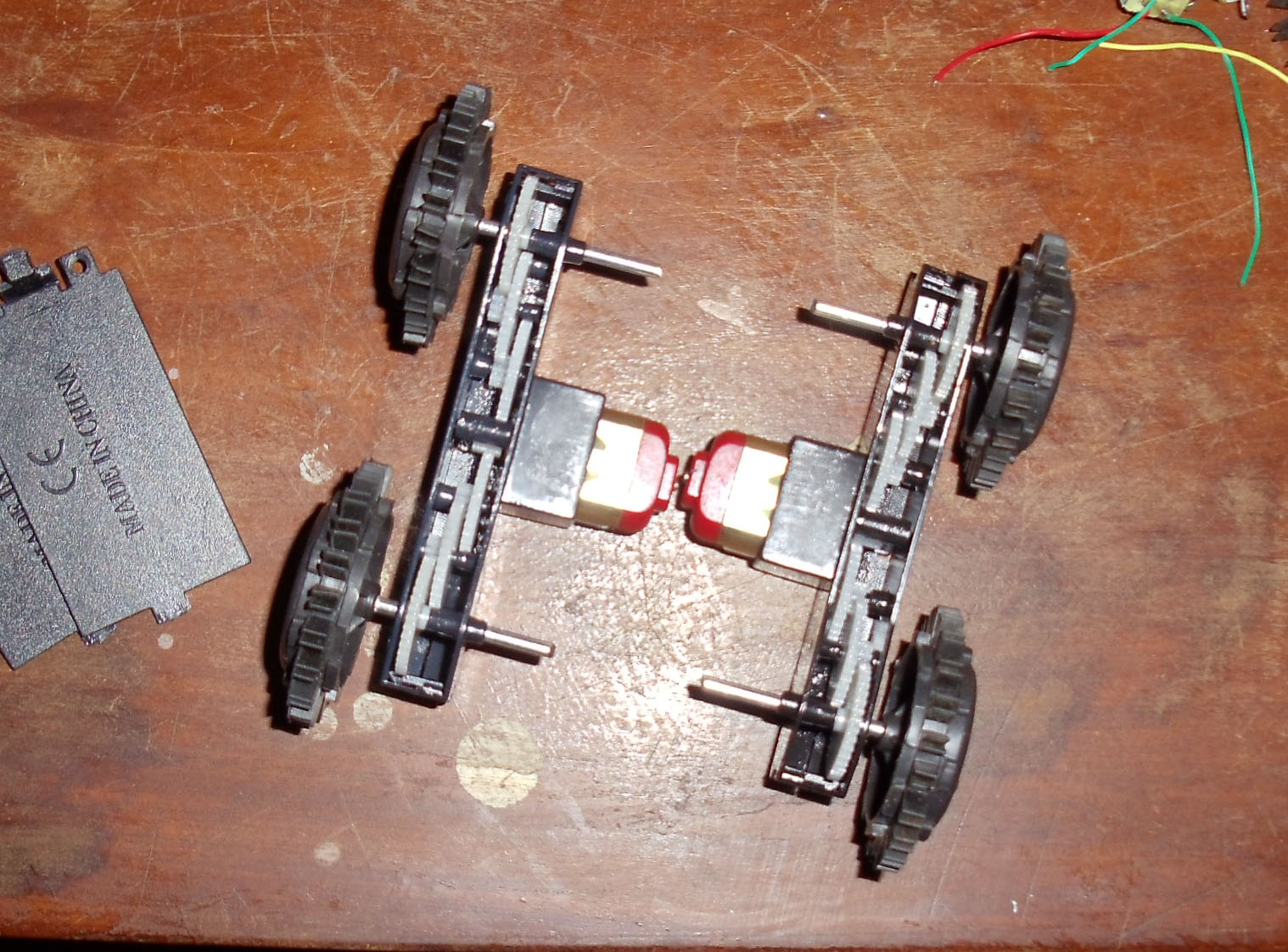
Los cuatro ejes recortados con la "caja" de engranajes reductores enfrentados.

4 - Unir los dos cuerpos formando uno. Esto se puede realizar con pegamento instantáneo (se puede encontrar en ferreterías, supermercados, farmacias, etc..).
Algunos amigos han incorporado una pieza de plastico como juntura entre las dos mitades.
En siguientes artículos iremos transformando esta base para convertirla en un robot completamente funcional.
Hasta luego.